Assistive Medical Devices for Parkinson’s Disease
Enhancing Mobility Through Haptic Cues
Worked On By: Minhua Zhang, N. Sertac Artan, Huanying Gu, Ziqian Dong, Lyudmila Burina Ganatra, Suzanna Sherman, Ely Rabin
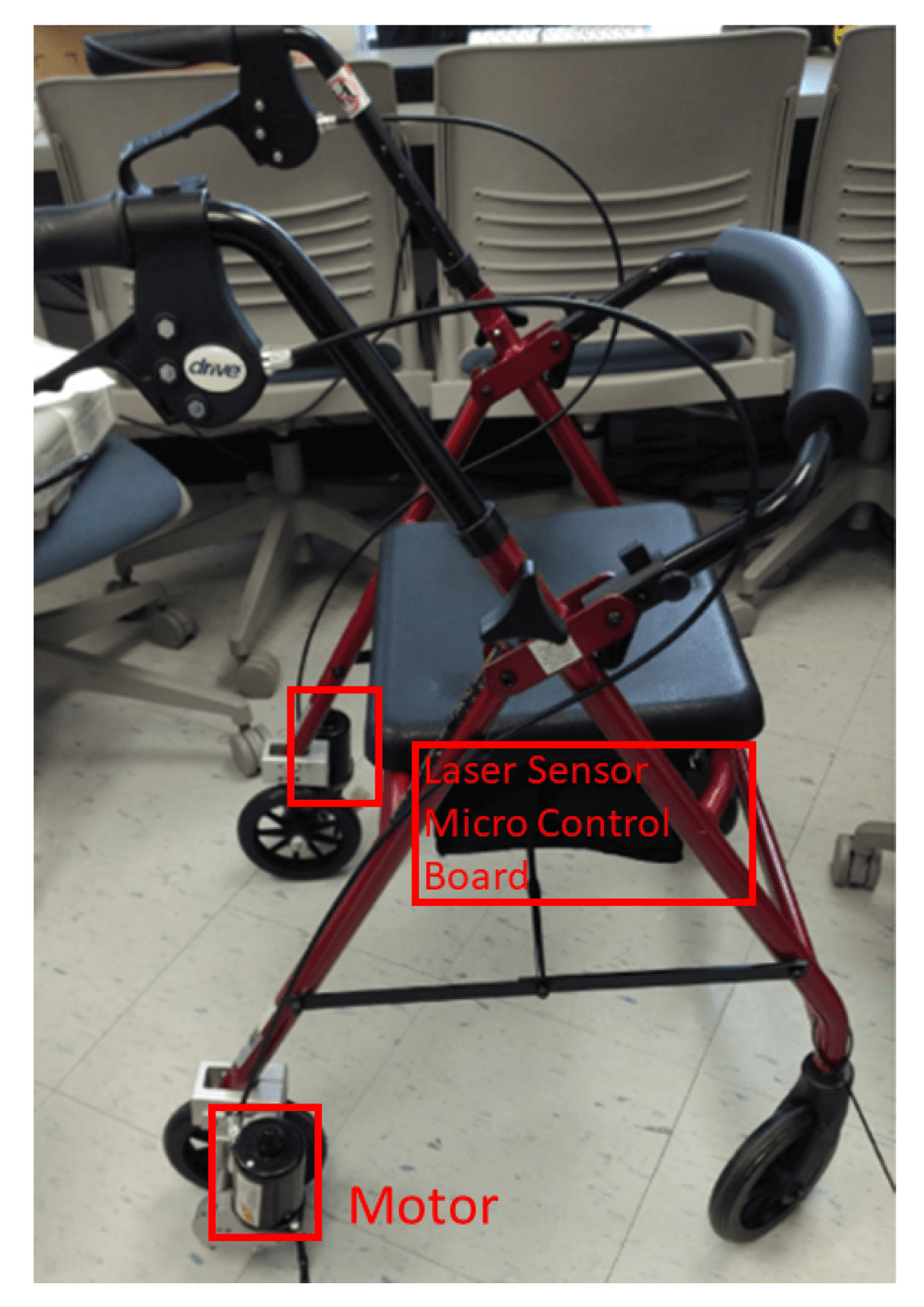
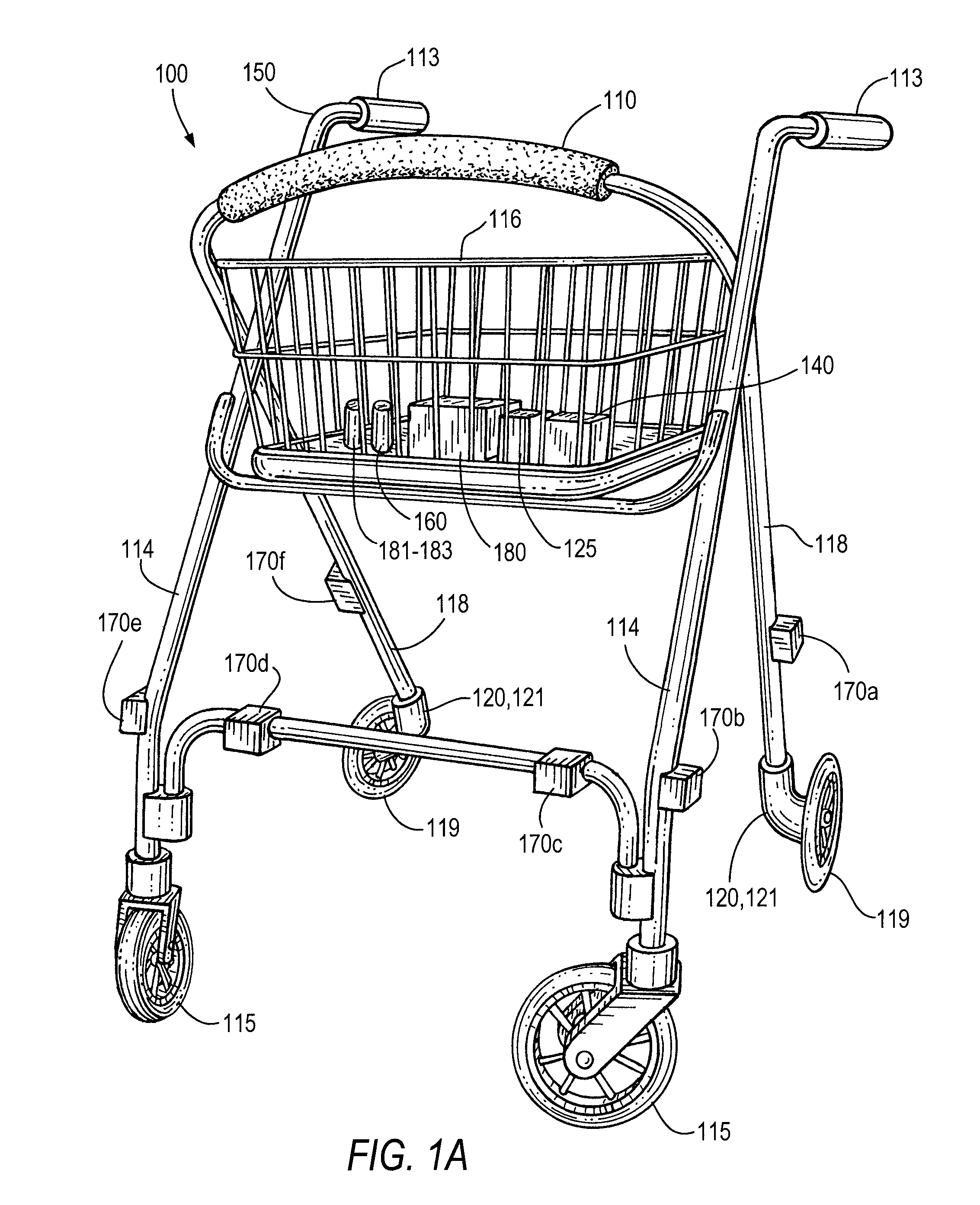
This project investigates the use of a motorized walker with haptic feedback to improve gait symmetry and reduce fall risk in patients with Parkinson’s disease. By leveraging motion capture technology and statistical analysis, we aim to transform raw gait data into actionable insights for rehabilitation. This collaborative effort involves researchers from the College of Engineering and Computing Sciences and the College of Osteopathic Medicine.
Our Mission
Our mission is to advance the understanding and treatment of gait abnormalities in Parkinson’s disease through innovative assistive technologies. By developing a motorized walker that provides haptic speed cues, we aim to enhance gait symmetry, reduce double support time, and improve overall mobility for patients. Our research bridges engineering and medicine, translating complex biomechanical data into practical solutions that empower patients and clinicians. Through this work, we strive to mitigate fall risks, restore natural gait patterns, and ultimately improve the quality of life for individuals with Parkinson’s disease.
Research Objectives
The research objectives of this project are to:
- Evaluate the immediate effects of haptic speed cues on gait symmetry and double support time in Parkinson’s patients.
- Compare gait parameters across three conditions: unassisted walking, conventional walker use, and motorized walker use with varying speed cues.
- Develop a robust signal processing framework to extract and analyze gait features from motion capture data.
- Assess the adaptability of patients to motorized walker use over repeated trials.
- Investigate the potential of motorized walkers as long-term rehabilitation tools to reduce freezing of gait episodes.